Digit Tactile Sensor
An inexpensive, compact, and high-resolution tactile sensor geared towards in-hand manipulation. Digit improves upon past vision-based tactile sensors by miniaturizing the form factor to be mountable on multi-fingered hands, and by providing several design improvements that result in an easier, more repeatable manufacturing process, and enhanced reliability.
What is Digit?
Digit is an easy-to-use, reliable, low-cost, compact, high-resolution, tactile sensor designed for robotic in-hand manipulation. The sensor is open-source so that everyone can build one. More information about Digit can be found in our paper or by playing the video below.
What does Digit Sense?
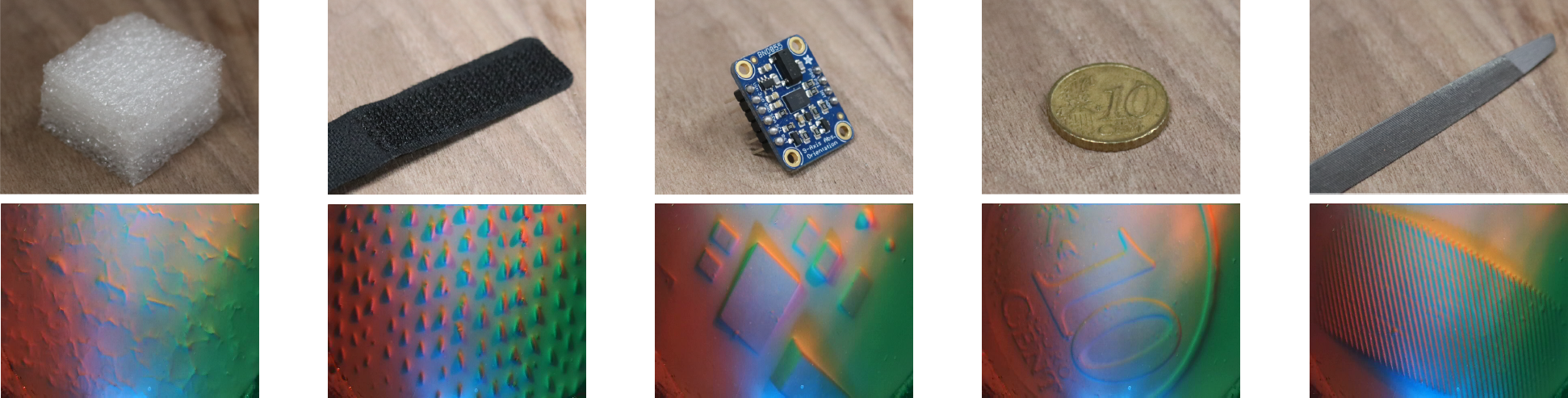
Digit senses the geometry of the object in contact, in the form of images. From these images, it is possible to estimate normal forces and, when used in conjunction with markers, shear forces.
How do I use Digit?
Digit is designed to be easy to connect and use — Digit is equipped with a standard USB-2.0 port, and its drivers/interface is available here.
Can I buy a Digit?
We understand that for many people might be difficult and time-consuming to manifacture a sensor themself. For this reason, we have partnered with GelSight Inc. to commercialize Digit. Fully assembled sensors can be easily bought from their online store.
On what robots can Digit be mounted?
Digit is designed to be natively compatible with the Wonik’s Allegro Hand. In addition, we provide files for 3d-printable adaptors for mounting Digit on several common robotic platforms.
Is there a simulator for Digit?
Yes! An open-source simulator for Digit is available at https://github.com/facebookresearch/tacto.
Can I use Machine Learning with Digit?
Yes! Digit is natively supported by the PyTouch open-source library for touch processing.